【供應】三自由度機械手設計,機器人三自由度的設計,平面三自由度精密定位平臺
【供應】三自由度機械手設計,機器人三自由度的設計,平面三自由度精密定位平臺
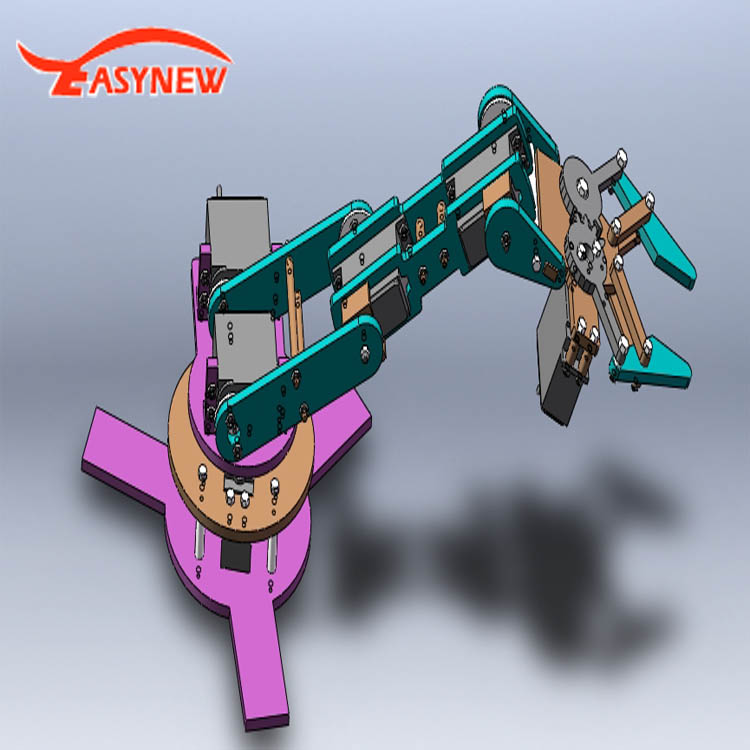
三自由度機械手設計:
用三自由度機械手為實驗用專用機械手,主要由手爪、手臂、機身、機座等組成,具備上料、搬運等多種功能,本機械手機身采用機座式,實驗對象圍繞機座布置,其坐標形式為關節式,具有水平旋轉、手臂豎直擺動等3個自由度;驅動方式為電機驅動,利用電機帶動減速機,減速機減速后帶動旋轉軸實現各個回轉運動。電動驅動的優點是控制精度高,能精確定位,反應靈敏,可實現高速、高精度的連續軌跡控制,伺服特性好。本次設計的機械手能對不同物體完成多種動作。采用單片機控制系統,最終實現關節的伺服控制和制動、實時監測機器人的各個關節的運動情況、機器人的在線修改程序、設置參考點和回參考點。
機器人三自由度的設計:
在工業上,自動控制系統有著廣泛的應用,如工業自動化機床控制,計算機系統,機器人等。而工業機器人是相對較新的電子設備,它正開始改變現代化工業面貌。本設計為三自由度直角坐標型工業機器人,其工作方向為三個直線方向,在控制器的作用下,它執行將工作從一個地方搬到另一個地方這一簡單的動作。
平面三自由度精密定位平臺:
本實用新型是一種平面三自由度精密定位平臺,包括輸出平臺、基座、三個柔順機構、三個壓電驅動器、三個驅動器定位裝置、三個位移傳感器和控制器。本實用新型由于三個柔順機構以及三個位移傳感器沿輸出平臺中心向外呈120°角分布,保證了運動傳遞的無間隙、無摩擦、免潤滑、高精度性和高穩定性,并且提高了輸出平臺移動的直線度;由于采用了柔順機構,不僅使得輸出平臺能同時提供X、Y方向平移,Z方向旋轉,而且使得輸出平臺和基座都在同一層次上;采用壓電陶瓷驅動器作為壓電驅動器,保證了驅動源的高精度運動輸出和快的響應速度,具有納米級的分辨率和亞微米級的定位精度。本實用新型可廣泛應用于精密定位領域。
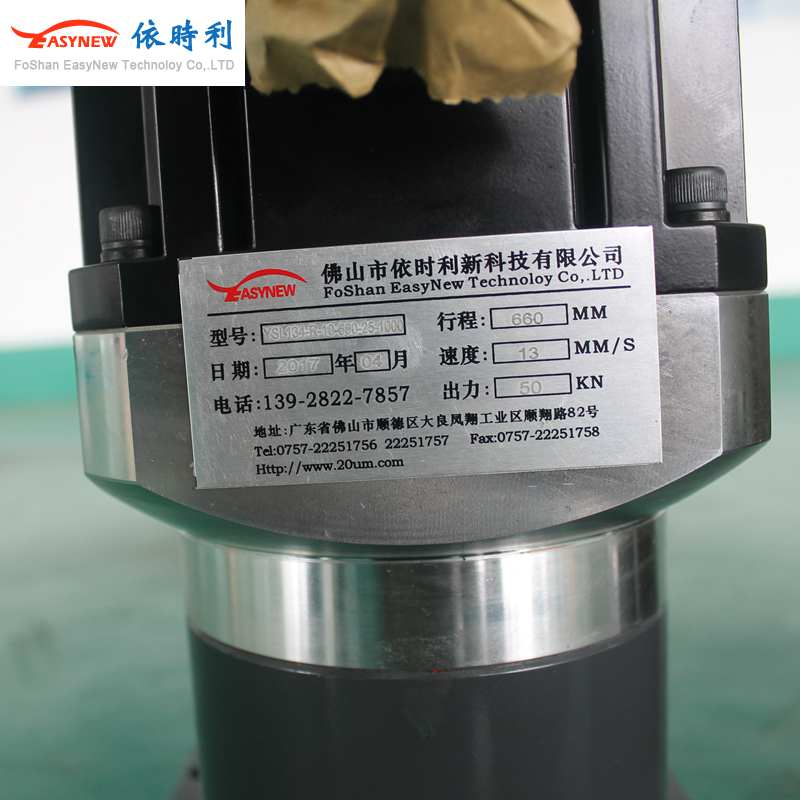
三自由度平臺主要是由三個伺服電動缸和控制器組成,了解請聯系我們報價。