要知道六自由度模擬穩(wěn)定平臺多少錢?首先要了解什么是六自由度平臺。
一、 什么是六自由度平臺
物體在空間具有六個自由度,即沿x、y、z三個直角坐標(biāo)軸方向的移動自由度和繞這三個坐標(biāo)軸的轉(zhuǎn)動自由度?。因此,要完全確定物體的位置,就必須清楚這六個自由度。
1:系統(tǒng)組成
六自由度平臺系統(tǒng)由Stewart機(jī)構(gòu)的六自由度運動平臺、計算機(jī)控制系統(tǒng)、驅(qū)動系統(tǒng)等組成。下平臺安裝在地面的固定基座基上,上平臺為支撐平臺。計算機(jī)控制系統(tǒng)通過協(xié)調(diào)控制電動缸的行程,實現(xiàn)運動平臺的六個自由度的運動,即笛卡爾坐標(biāo)系內(nèi)的三個平移運動和繞三個坐標(biāo)軸的轉(zhuǎn)動。
各主要部分簡述如下:
1)運動平臺
上平臺:連接需要被模擬動作的機(jī)構(gòu)
上鉸鏈:雙回轉(zhuǎn)軸的虎克鉸結(jié)構(gòu),用于連接上平臺與電動缸的活塞桿。
下鉸鏈:單虎克鉸結(jié)構(gòu),用于連接固定基座與電動缸的筒體。
下平臺:安裝固定基座。
2)計算機(jī)控制系統(tǒng)硬件
運動控制計算機(jī)(伺服控制單元):實現(xiàn)平臺系統(tǒng)啟動/停止、接收上位機(jī)發(fā)來的位姿控制信息、對電動缸進(jìn)行運動控制、監(jiān)控伺服電機(jī)驅(qū)動器的工作狀態(tài)、監(jiān)控系統(tǒng)的運動狀態(tài)、完成故障處理以及安全保護(hù)工作。
信號調(diào)理單元:完成與平臺系統(tǒng)運動狀態(tài)相關(guān)的各種傳感器信號、測試信號和數(shù)字I/O信號的調(diào)理,以及伺服驅(qū)動器的驅(qū)動等。
3)系統(tǒng)控制軟件
運動控制計算機(jī)的軟件包括運動控制軟件和邏輯控制軟件。
定平臺多少錢?插圖")
二、 六自由度平臺的價格
這是由需求決定的,因為六自由度平臺是由六個伺服電動缸組成,還要控制系統(tǒng),控制軟件算法。這些成本會影響六自由度平臺的價格。
伺服電動缸的成本是由伺服電機(jī),減速機(jī),還有缸體組成,如果要求的負(fù)載高,那么就要功率大的伺服點擊,比如3000w的,還有伺服電機(jī)的品牌,是進(jìn)口的還是國產(chǎn)的,還有軟件算法等等,都會影響價格。
因此不能一概而論,需要詳細(xì)定制才知道價格。
定平臺多少錢?插圖1")
輪船六軸搖擺平臺,在輪船和發(fā)動機(jī)裝置合裝過程中,輪船身在摩擦線吊具上走到某工位時停止,定位裝置定住。底盤組件在滾床上傳送到此工位停止,定位裝置定位好托盤,然后六軸同步升降平臺同步往上頂?shù)侥骋晃恢茫瓿绍嚿砗桶l(fā)動機(jī)裝置的合裝。對于六軸同步控制系統(tǒng),采用主、從軸跟蹤控制方式,主軸為控制器內(nèi)部設(shè)定的虛擬軸,也就是指令軸,其他六軸作為從軸,在形成各自的伺服位置控制回路時,通過電子凸輪同時跟蹤主軸,保持同步。由于各個軸的控制回路的掃描周期小于1ms,保證了各個軸的高速、高精度的位置控制(跟蹤)精度,同步精度為0.03mm。

汽車車身(6軸同步)升降平臺:在汽車車身和發(fā)動機(jī)裝置合裝過程中,車身在摩擦線吊具上走到某工位時停止,定位裝置定住。底盤組件在滾床上傳送到此工位停止,定位裝置定位好托盤,然后六軸同步升降平臺同步往上頂?shù)侥骋晃恢茫瓿绍嚿砗桶l(fā)動機(jī)裝置的合裝。對于六軸同步控制系統(tǒng),采用主、從軸跟蹤控制方式,主軸為控制器內(nèi)部設(shè)定的虛擬軸,也就是指令軸,其他六軸作為從軸,在形成各自的伺服位置控制回路時,通過電子凸輪同時跟蹤主軸,保持同步。由于各個軸的控制回路的掃描周期小于1ms,保證了各個軸的高速、高精度的位置控制(跟蹤)精度,同步精度為0.03mm。
了解六自由度運動平臺應(yīng)用范圍請咨詢依時利新。
]]>
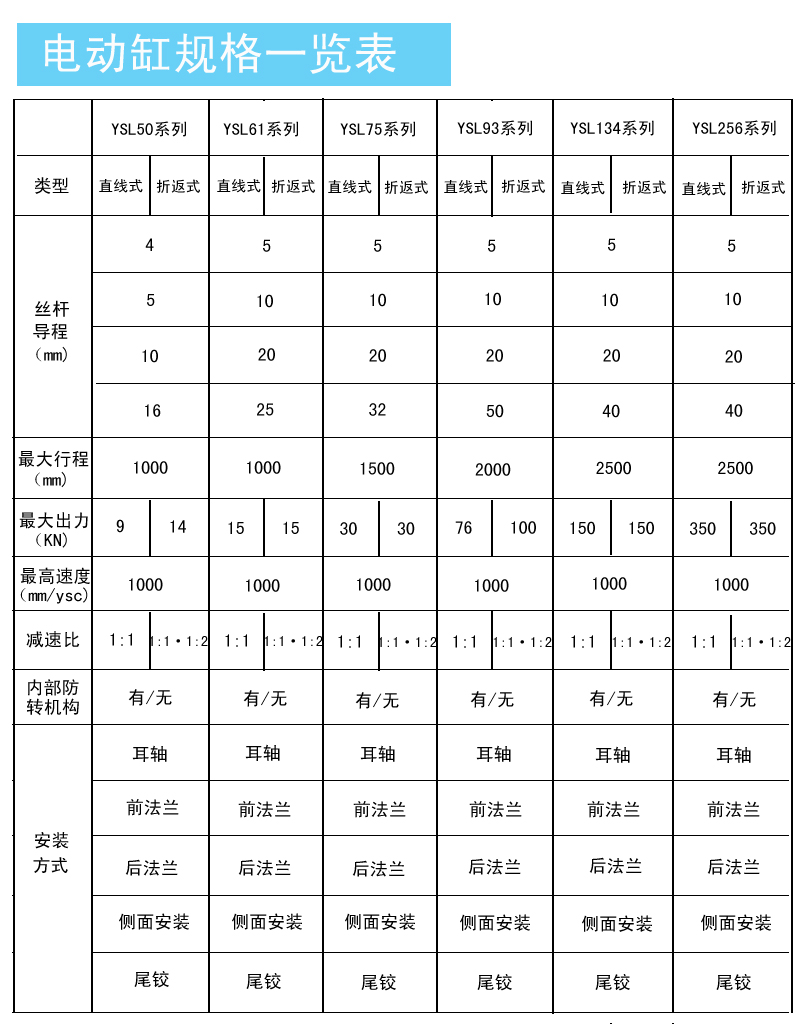
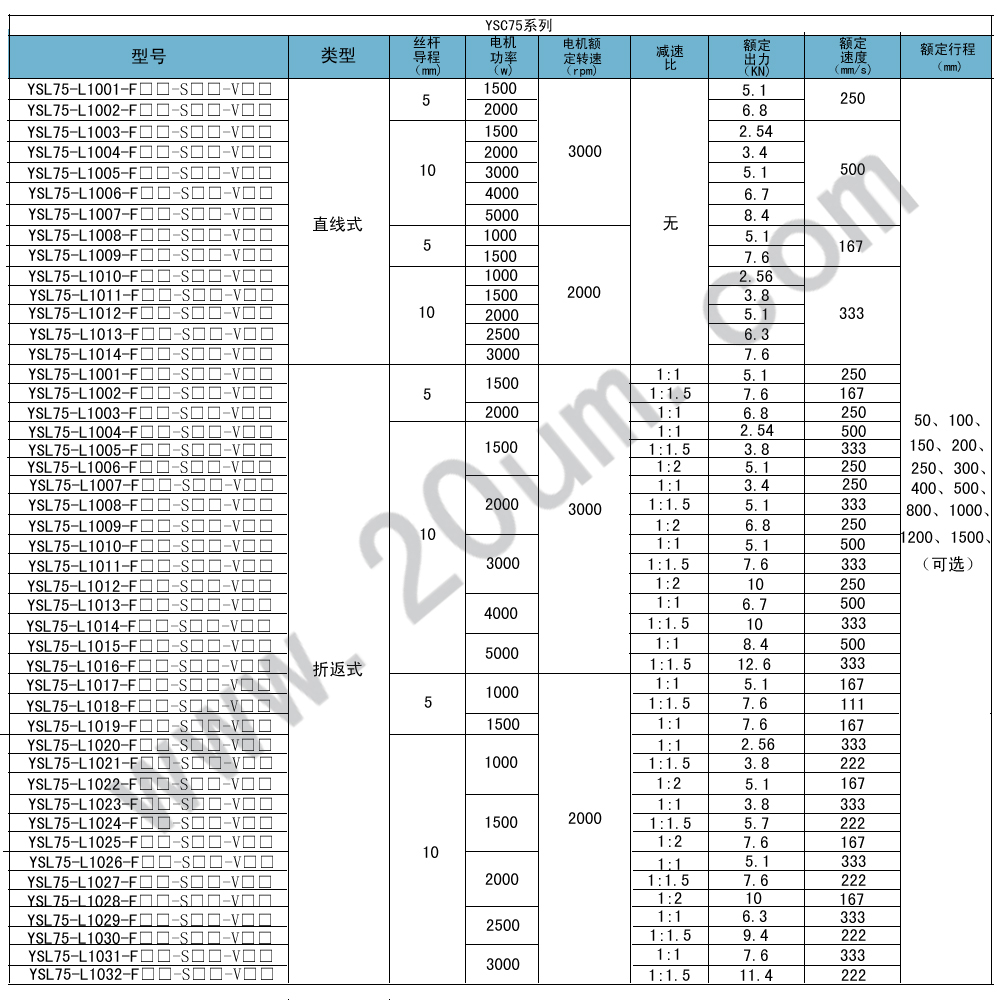
電動缸選型介紹
一電機(jī)輸出扭矩與電動缸輸出力的關(guān)系 F = T*η*2π*R/L
F:電動缸輸出力,單位:kN
T:電機(jī)輸出扭矩,單位:Nm R:減速比
L:絲桿導(dǎo)程,單位:mm η:效率
(一般選擇電動缸的總效率為85%,但是效率根據(jù)實際使用工況會有變化,請注意)
二電動缸的壽命計算
電動缸的壽命一般指電動缸內(nèi)部使用的絲桿壽命,可以分為兩個部分,一是絲桿的疲勞壽命,它可以通過計算得出;另一個是使用壽命,取決于使用條件(如溫度、灰塵、使用潤滑的種類和定期添加的頻率等等)。
三平均負(fù)載的計算
平均負(fù)載是指電動缸在一個工作循環(huán)中,綜合在各個不同工作區(qū)間的力、速度和時間后得出的立方平均值。
四電動缸參數(shù)參考如下圖
一般來說控制伺服電機(jī)都是PLC或者運動控制器之類,直接用伺服電機(jī)做普通速度控制還不如變頻器方便:但是同功率伺服電機(jī)輸出力矩和調(diào)速范圍大于普通電機(jī)。

了解電動缸價格請關(guān)注依時利新科技有限公司。
]]>
伺服電缸原理:伺服電缸是將伺服電機(jī)與絲杠一體化設(shè)計的模塊化產(chǎn)品,將伺服電機(jī)的旋轉(zhuǎn)運動轉(zhuǎn)換成直線運動,同時將伺服電機(jī)最佳優(yōu)點-精確轉(zhuǎn)速控制,精確轉(zhuǎn)數(shù)控制,精確扭矩控制轉(zhuǎn)變成-精確速度控制,精確位置控制,精確推力控制;實現(xiàn)高精度直線運動系列的全新*性產(chǎn)品。
伺服電缸特點:閉環(huán)伺服控制,控制精度達(dá)到0.01mm;精密控制推力,增加壓力傳感器,控制精度可達(dá)1%;很容易與PLC等控制系統(tǒng)連接,實現(xiàn)高精密運動控制。噪音低,節(jié)能,干凈,高剛性,抗沖擊力,超長壽命,操作維護(hù)簡單。伺服電缸可以在惡劣環(huán)境下無故障,防護(hù)等級可以達(dá)到IP66。長期工作,并且實現(xiàn)高強(qiáng)度,高速度,高精度定位,運動平穩(wěn),低噪音。所以可以廣泛的應(yīng)用在造紙行業(yè),化工行業(yè),汽車行業(yè),電子行業(yè),機(jī)械自動化行業(yè),焊接行業(yè)等。
低成本維護(hù):伺服電缸在復(fù)雜的環(huán)境下工作只需要定期的注脂潤滑,并無易損件需要維護(hù)更換,將比液壓系統(tǒng)和氣壓系統(tǒng)減少了大量的售后服務(wù)成本。
液壓缸和氣缸的最佳替代品:伺服電缸可以完全替代液壓缸和氣缸,并且實現(xiàn)環(huán)境更環(huán)保,更節(jié)能,更干凈的優(yōu)點,很容易與PLC等控制系統(tǒng)連接,實現(xiàn)高精密運動控制。
配置靈活性:可以提供非常靈活的安裝配置,全系列的安裝組件:安裝前法蘭,后法蘭,側(cè)面法蘭,尾部鉸接,耳軸安裝,導(dǎo)向模塊等;可以與伺服電機(jī)直線安裝,或者平行安裝;可以增加各式附件:限位開關(guān),行星減速機(jī),預(yù)緊螺母等;驅(qū)動可以選擇交流制動電機(jī),直流電機(jī),步進(jìn)電機(jī),伺服電機(jī)
伺服氣缸,是由自由潤滑低摩擦雙作用氣缸和氣動伺服閥整理安裝而構(gòu)成的組合裝置,是引導(dǎo)活塞在其中進(jìn)行直線往復(fù)運動的圓筒形金屬機(jī)件。
伺服汽缸以標(biāo)準(zhǔn)氣缸為主體,以電子氣缸定位器為核心,并且通過給定的標(biāo)準(zhǔn)模擬電信號完成對氣缸拉桿伸出0-100%的全過程的連續(xù)模擬控制。通常,伺服氣缸可以用在管道的流量控制、空調(diào)風(fēng)道門及各種氣動糾偏器上。
應(yīng)用
伺服:氣缸主要用在印刷(張力控制)、半導(dǎo)體(點焊機(jī)、芯片研磨)、自動化控制、機(jī)器人等領(lǐng)域。
自鎖性能:
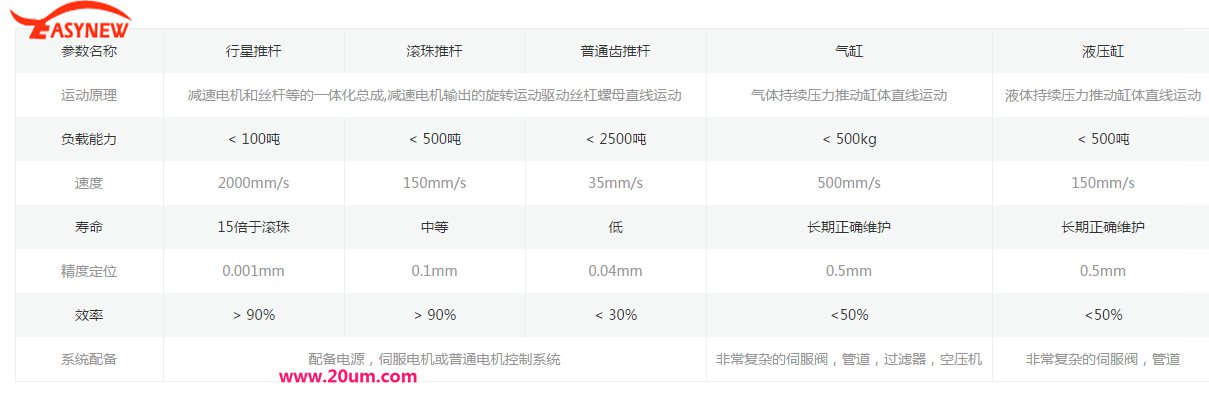
普通齒絲杠電動推桿和螺旋升降機(jī),由于綜合傳動效率低,大部分有絕對動載自鎖功能,增加設(shè)備運行的安全性;
精度定位:
綜合位置精度可達(dá)0,1mm; 伺服電動缸位置精度可至0.1um;
精確控制:
配置編碼器,通過變頻器或控制器控制,實現(xiàn)閉環(huán)精確定位;如精度要求不高,可配備電位計實現(xiàn)在線控制;
同步性:
單減速電機(jī)通過機(jī)械聯(lián)結(jié)同時驅(qū)動多臺推桿,實現(xiàn)同步升降并絕對同步;
驅(qū)動系統(tǒng):
直流電機(jī)12/24V, 單相交流電機(jī),三相交流電機(jī),無需氣源/液壓源;
過載保護(hù):
可配備安全離合器防過載;也可配備過載壓力傳感器防過載;
負(fù)載高:
推/拉力可至250噸;
其他:
維護(hù)簡單,噪音低,可在高/低溫,防腐/防爆惡劣環(huán)境正常工作;
是因為松下電機(jī)質(zhì)量好,還是價格便宜呢?


1、?電動缸的絲杠一般分為?5級和7級,可以提供更高的精度,需要特殊訂貨?。
2、?最大推力為最大瞬時推力,連續(xù)推力為最大推力的60%,靜載荷可達(dá)到最大力。
3、?電動缸全長:咨詢辦事處技術(shù)人員。
4、?絲杠長度和直徑用于計算轉(zhuǎn)動慣量。
5、?無負(fù)載轉(zhuǎn)矩不加負(fù)載時需要的最小啟動轉(zhuǎn)矩。
6、?推力轉(zhuǎn)矩系數(shù)指1牛頓米的轉(zhuǎn)矩所產(chǎn)生的推力
7、?最大推力與行程和速度有關(guān),行程長、速度快則推力降低10%。
8、?回程間隙可以采用雙螺母消除,總長度則加長,需特殊訂貨。
9、?采用雙螺母可以增大推力,總長度則加長,需特殊訂貨。
10、 電動缸的精度受絲杠精度和導(dǎo)向精度的影響。
11、 大于20mm導(dǎo)城的絲杠供貨期較長,需要特殊訂貨。
以上是伺服電動缸選型的基本問題,我們一般情況下可以先根據(jù)以上條件做個基本選型。如有不詳請咨詢公司技術(shù)人員。 我們的網(wǎng)站是www.20um.com
]]>
機(jī)械手上的一個電機(jī)與機(jī)器撞了一下,這個電機(jī)的伺服驅(qū)動器就壞了,目前已更換新的好了,但是不知道為什么會壞?請哪位幫我分析一下,我只需要一些可能的原因,不一定要非常準(zhǔn)確的,謝謝各位了!兄弟我沒有分了,不好意思,請大家?guī)蛶兔?
答:

伺服電機(jī)是很怕撞的,因為在伺服電機(jī)的軸端裝有編碼器,現(xiàn)在多是2500或者17位之類的編碼器,這類編碼器是在樹脂塑料盤,或者玻璃盤上通過激光刻線標(biāo)記位置,這個部件是很脆弱的,由于碰撞,可能毀壞,或者讓他和光電讀取頭發(fā)生位置上的扭曲,就毀損電機(jī),至于電機(jī)本體,是個鐵疙瘩,只要不燒,壞還是挺難得,另外如果帶有抱閘的電機(jī),如果外力太大,可能會弄壞抱閘。
了解電動缸價格請咨詢依時利新科技有限公司
]]>
電動缸抖動的因素有很多種,有可能:
- 采購的時候沒有考慮絲桿的細(xì)長比,過長,速度過快導(dǎo)致的抖動(這種情況一般占多數(shù))
- 同心度不夠
- 電機(jī)位置沒安裝好
- 同步帶同步輪裝配時沒有配合好